Unser Konzept sieht die Vorverarbeitung der Sensorwerte über einen zusätzlichen Mikrocontroller vor. Hierbei handelt es sich um den ATMEL Mikrocontroller AT90CAN128. Dieser liest alle Sensorwerte ein, verarbeitet diese und sendet die Daten über das Bussystem CAN (Controller Area Network) an unser zentrales Steuergerät.
Im Detail werden:
- … 4 Raddrehzahlen über eine Reflexions-Lichtschranke ermittelt. Hierzu wurde an der Innenseite eines jeden Rades ein Encoderstreifen geklebt. Das ausgesendete Infrarot-Licht der Reflexions-Lichtschranke wird an den weißen Flächen reflektiert und wiederum an den schwarzen Flächen absorbiert. Der Fototransistor registriert diese Änderungen. Anschließend wird das erfasste analoge Spannungssignal über einen Schmitt Trigger an die Pegel des Microcontrollers angepasst und folglich digitalisiert.
- … die Änderung des Lenkwinkels über ein Potentiometer erfasst. Über die Widerstandsänderung am Schleifer (proportional zur Spannung) wird der Lenkwinkel erfasst. Das analoge Spannungssignal wird am Mikrocontroller über den Analog/Digital-Wandler eingelesen.
- … Beschleunigungssensoren und ein Gierratensensor mit folgender Bezeichnung verwendet:
1. ADXRS610: Gierratensensor (Gyroskop)
2. ADXL203EB: 2-achsiger BeschleunigungssensorDie Signale dieser Sensoren werden analog ausgegeben und ähnlich dem Lenkwinkel über den A/D-Wandler eingelesen.
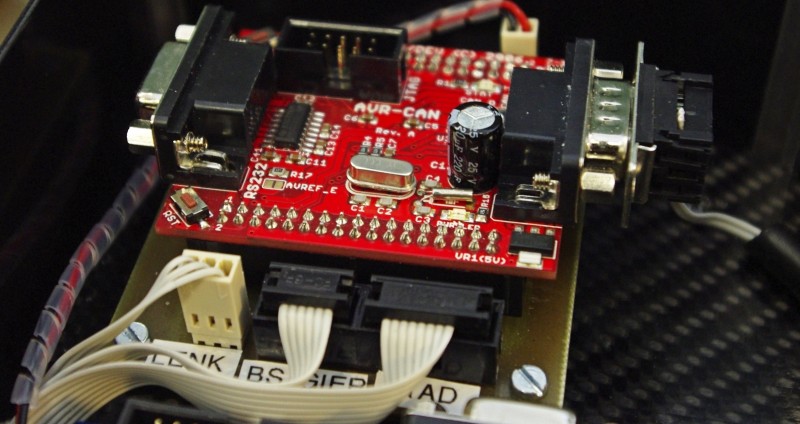
Weiterhin wurde für den Mikrocontroller (AT90CAN128) eine Adapterplatine (Leiterplatte) hergestellt welche sowohl alle notwenigen Anschlüsse als auch Bauelemente aufnimmt. Hinzu kamen diverse Anschlussplatinen für die Anbindung der einzelnen Sensorelemente.
