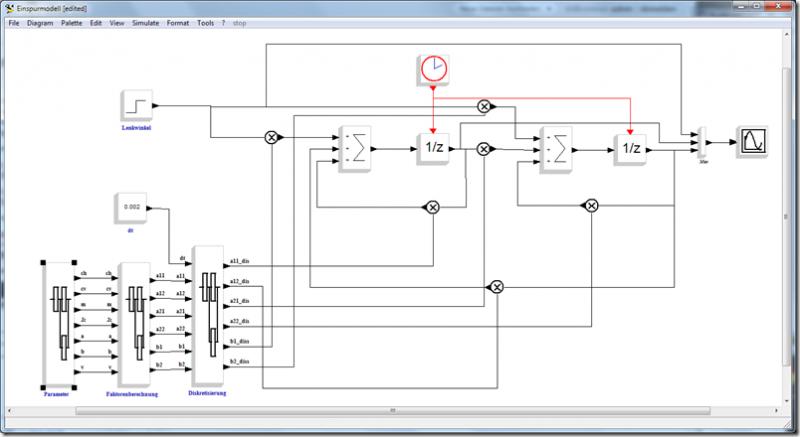
Auf Grundlage der kostenfreien Berechnungssoftware Scicoslab 4.4 wurde ein diskretes Einspurmodell aufgebaut, mit welchem Vorhersagen über das zu erwartende Fahrverhalten des Modellautos getroffen werden können. Als Eingangsparameter wird der Lenkwinkel, als Ausgangsparameter die Gierrate und der Schwimmwinkel berechnet. Die fahrzeugspezifischen Parameter wie Schräglaufsteifigkeit, Masse, Massenträgheitsmoment, Schwerpunktlage und Fahrgeschwindigkeit bilden dabei die Konstanten, welche das dynamische Fahrverhalten bestimmen.
Das Scicoslabmodell entspricht der modellbasierten Darstellung des folgenden Differentialgleichungssystems in zeitdiskreter Form:
 \cdot \dot\psi + \frac {c_{\alpha V}} {m \cdot v} \cdot \delta")

Dieses Differentialgleichungssystem wird in die Zustandsraumdarstellung gebracht:

Beispiel SuperBlock: Faktorenberechnung aus Fahrzeugparametern

Beispiel Superblock: Berechnung für Faktor a21

Die modellbasierte Simulation erlaubt es
- das Verhalten des Modellautos zu beschreiben
- Theorien über das Verhalten zu interpretieren
- das zukünftige Verhalten des Modellfahrzeugs vorher zu sagen
Damit lassen sich Fahrdynamikregelsysteme wie ESP oder ABS entwickeln ohne aufwendige Versuchsfahrten unternehmen zu müssen.
Beispielhaft wird bei sprunghafter Änderung des Lenkwinkels folgende Gierrate und Schwimmwinkel hervorgerufen:

Literaturempfehlung: [Kramer – Kraftfahrzeugführung]

3 Comments
Hi,
hat man vllt. die Möglichkeit in den Diskretisierungsblock zu schauen.
Kann man dieses Modell irgendwie herunterladen?
viele Grüße
Sehr geehrter Herr Saldirak,
das Einspurmodell ist sehr detailliert in der angegebenen Literaturempfehlung erklärt. Dort können Sie auch die Diskretisierungsschritte sehen.
Kraftfahrzeug-führung: Modelle-Simulation-Regelung Von Ulrich Kramer
Hallo, wurde die Simulation der in der Grafik abgebildet mit den Parametern des RC-Autos als für Schräglaufsteifigkei vorne/hinten usw. ausgeführt ?
One Trackback
[...] Bereits im Grundstudium werden Einführungspraktika zum Thema Fahrdynamiksensorik durchgeführt. Dabei soll den Studenten vermittelt werden, welche Sensorik überhaupt nötig ist, damit ein Fahrzeug den eigenen Zustand berechnen kann. Beispielhaft wird eine statische Kreisfahrt durchgeführt um Kenntnis der physikalischen Werte und dessen zeitlichen Verlauf zu erlangen. Es ist mehr als deutlich zu erkennen, dass es den Lernenden leichter fällt den Zusammenhang von Gierrate und Querbeschleunigung während einer Kurvenfahrt durch einen praktischen Fahrversuch zu erkennen, als nur durch die formelmäßigen Zusammenhänge des Einspurmodells. [...]