Nachdem vor einiger Zeit die Dynamik des Antriebsstranges bestimmt wurde, konnte jetzt eine Regelung entworfen werden, welche im Rahmen der Möglichkeiten, eine Reduzierung des Radschlupfs bewirkt. Da der von uns verwendete Elektromotor (Plettenberg Dinator 50/3) samt der Getriebeuntersetzung (1:16) ein so großes Antriebsmoment auf die Straße bringt, das der Reifen völlig überfordert ist, war es notwendig eine Antriebsschlupfregelung ASR zu entwickeln.
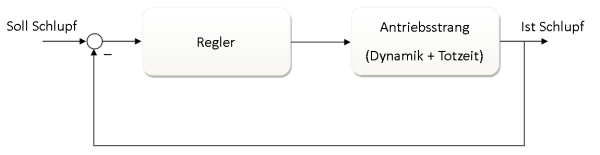
Standard Regelkreis
Durch die erhebliche Totzeit von 200ms, welche vermutlich durch Drehzahlsteller, Getriebe und Differenzial entstehen, war es nicht möglich einen gewöhnlichen Proportional- oder Proportional/Integralregler einzusetzen. Simulationen mit diesen Reglern lieferten kein zufriedenstellendes Ergebnis.
Regelung mit Smith-Prädiktor
Daher musste ein so genannter Smith-Prädiktor eingesetzt werden.
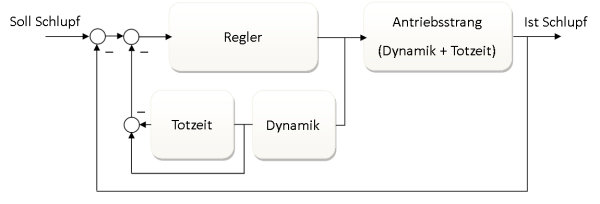
Bei diesem Verfahren wird das Wissen über die zu regelnde Strecke (Dynamik des Antriebsstranges) in eine Rückführung gelegt und die Totzeit gesondert abgezogen.
Regelung trotz Totzeit
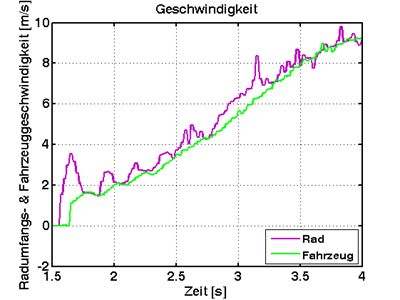
Als Resultat konnte eine Antriebsschlupfregelung appliziert werden, welche das Anfahren bei Volllast ermöglicht, ohne dass die Räder zu 100% durchdrehen.
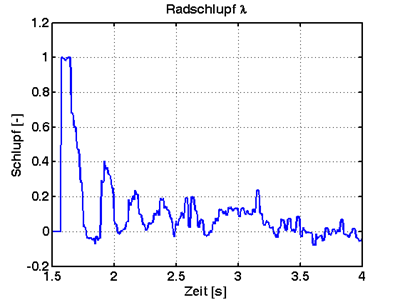
Im nachstehenden Diagramm ist die Fahrzeuggeschwindigkeit (grün) und die Radumfangsgeschwindigkeit (lila) dargestellt. Zu sehen ist, dass die Radgeschwindigkeit trotz Vollgas immer nur leicht über der Fahrzeuggeschwindigkeit liegt. Das Antriebsmoment wird auf den Sollschlupf 10% reduziert.
Der Antriebsschlupf für diesen Beschleunigungsvorgang ist in folgendem Diagramm dargestellt.