Die vergangenen Wochen waren geprägt von fahrdynamischen Zusammenhängen, Mathematik und modellbasierter Softwareentwicklung. Als Resultat konnte ein Fahrzeugmodell entwickelt werden, mit welchem sich an Hand von den Modelleingangsparametern Fahrpedalstellung, Bremspedalstellung und Lenkradwinkel simulieren lässt, wie sich das Fahrzeug Längs-, als auch Querdynamisch verhalten wird.
Längsdynamik
- Fahrzeuggeschwindigkeit
- Längsschlupf der Reifen (Antriebs- und Bremsschlupf)
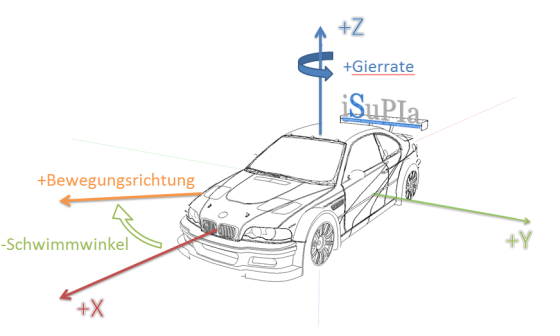
Querdynamik
- Querbeschleunigung
- Gierrate
- Schwimmwinkel
Das hat den Vorteil, dass für die nun folgende Funktionsentwicklung (ABS, ASR, ESP, …) mit dem Rechnermodell gearbeitet werden kann und logische Aktoransteuerungen in der Simulation detailliert untersucht werden können, anstatt die teure Hardware dem Stresstest auszusetzen.
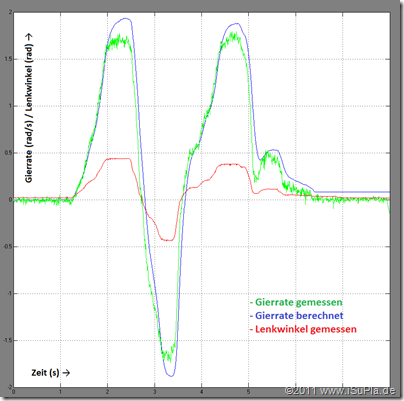
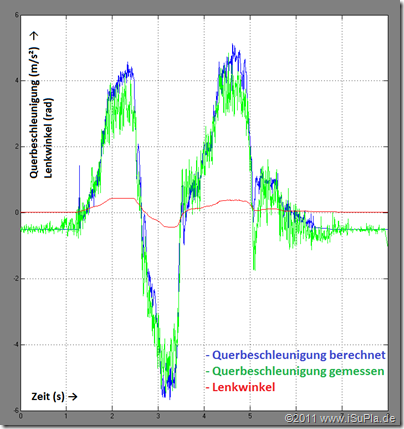
Alle Theorie macht keinen Sinn, wenn sie nicht durch praktische Fahrversuche bestätigt bzw. validiert werden kann. Dies ist heute geschehen. Mit einer erstaunlichen Genauigkeit kann das Matlab/Simulink-Modell die querdynamischen Fahrparameter (Querbeschleunigung, Gierrate, Schwimmwinkel) berechnen.
Gierrate
Querbeschleunigung
Fahrzeugparameter Modellfahrzeug Maßstab 1:5
| Fahrzeugmasse | 12 kg |
| Abstand Schwerpunkt zu Vorderachse | 0.30 m |
| Abstand Schwerpunkt zu Hinterachse | 0.24 m |
| Massenträgheitsmoment um z-Achse | 1 kgm² |
| Schräglaufsteifigkeit vorn | 250 N/rad |
| Schräglaufsteifigkeit hinten | 700 N/rad |
Der sehr niedrige Wert der Schräglaufsteifigkeit an der Vorderachse ist durch ungenügende Auslegung der Lenkgeometrie begründet. Beim Einlenken entsteht am kurvenäußeren Rad ein so starker Sturz, dass kaum mehr Querkraft übertragen werden kann. Könnte dies verbessert werden, entstünde durch die Schwerpunktlage ein übersteuerndes Fahrzeug.
Hinweis: Die angegebenen Parameter stimmen näherungsweise für unser Fahrzeug, mit unserer Achsgeometrie, mit unseren Reifen auf unserer Fahrbahn. Es kann natürlich keine allgemeingültige Aussage über z.B. die Schräglaufsteifigkeiten der Reifen von Modellfahrzeugen entnommen werden.

5 Comments
Warum wurde für die Simulation nicht Simulink verwendet? Das Programm arbeitet mindestens genauso schnell und ist jedem bekannt.
Gruß
N. Brückner
Sehr geehrter Prof. Brückner,
Sie beziehen sich sicherlich auf den Beitrag, in dem wir darüber schreiben, dass wir mit der Open Source Variante ScicosLab arbeiten. Das hat sich überholt. Wir mussten feststellen, dass Scicoslab noch nicht auf der Höhe der Anforderungen ist. Siehe: http://isupia.de/blog/2011/01/matlabsimulink-mit-real-time-workshop/
Wir arbeiten seit Anfang 2011 mit Matlab/Simulink und auch dieses Modell wurde mit Matlab/Simulink erstellt.
Vielen Dank für den Hinweis. Es war uns natürlich klar, dass Simulink eine komfortablere Software ist. Dennoch ist es kostenpflichtig. Gerade im Hinblick auf die angedachte Zielgruppe der Studenten, wäre es äußerst interessant gewesen, hätte man ähnlich gute Resultate mit kostenfreien Programmen erzielen können.
Ich würde mich freuen, wenn wir auch weiterhin konstruktive Hinweise von Ihnen erhalten könnten und Sie als regelmäßigen Leser unseres Blogs gewinnen konnten.
Mit freundlichen Grüßen,
Paul Balzer
Guten Tag!
Eine weitere gute Alternative wäre Modelica.
Vorteile: Offene Modellierungssprache, es existieren freie (etwa OpenModelica) und kommerzielle (etwa Dymola) Umgebungen dafür.
Beste Grüße
Oliver Grünewald
Hallo zusammen,
erstmal ein dickes Lob für den tollen Blog! Ich arbeite gerade an einem ähnlichen Projekt und habe eine Frage:
Habt ihr die Schräglaufsteifigkeiten und das Gierträgheitsmoment mit der auf dem Auto vorhandenen Sensorik ermittelt?
Ich kann nämlich nur die Beschleunigungen messen und kenne den vorgegebenen (nicht tatsächlichen) Lenkwinkel.
Wäre toll wenn ihr mir zumindest sagen könntet, ob die Parameter auch anders ermittelt werden können.
Grüße
Albrecht
Hallo Albrecht,
vielen Dank! Die Parameter findet man mit ja eben mit dieser Modellvalidierung. Man nimmt ein physikalisches Modell an, was die Bewegung beschreibt (Einspurmodell) und fährt dann ein Manöver ab. Die Reaktion (Querbeschleunigung, Gierrate) auf Eingangswerte (Lenkwinkel) kann man messen und passt dann die unbekannten Parameter (Massenträgheitsmoment, Schräglaufsteifigkeit) iterativ so an, bis die theoretische (aus Simulation) und die praktisch gemessenen Werte überein stimmen. Das ist auch im Bild oben zu sehen.
Ist sozusagen die ganz pragmatische Herangehensweise. Natürlich können sich dabei auch Fehler einschleichen, wenn man z.B. im nichtlinearen Bereich unterwegs ist, aber das Modell haben wir eben nicht detaillierter gemacht.
Viele Grüße
One Trackback
[...] mit Hilfe des linearisierten Einspurmodells berechnet, wie sich das Fahrzeug bewegen sollte. Also welche Reaktionen durch einen bestimmten Lenkwinkel zu erwarten sind. Dabei ist die Sollgierrate das zentrale Element. Die Sollgierrate wird zweifach berechnet und der [...]