Die Position des Fahrzeugs kann aus Bildinformationen einer Kamera berechnet werden. Befindet sich das Fahrzeug auf einem ebenen Untergrund hat es drei Freiheitsgrade: X-Position, Y-Position und Orientierung. Ausgehend davon können die zweidimensionale Position und die Fahrtrichtung bestimmt werden.
Um an diese Informationen zu gelangen, werden mit Hilfe eines Simulink-Modells Bewegungen des Fahrzeuges erkannt. Aus der Lage im Bild wird die Position im Raum berechnet und anschließend die Fahrzeuggeschwindigkeit ermittelt.
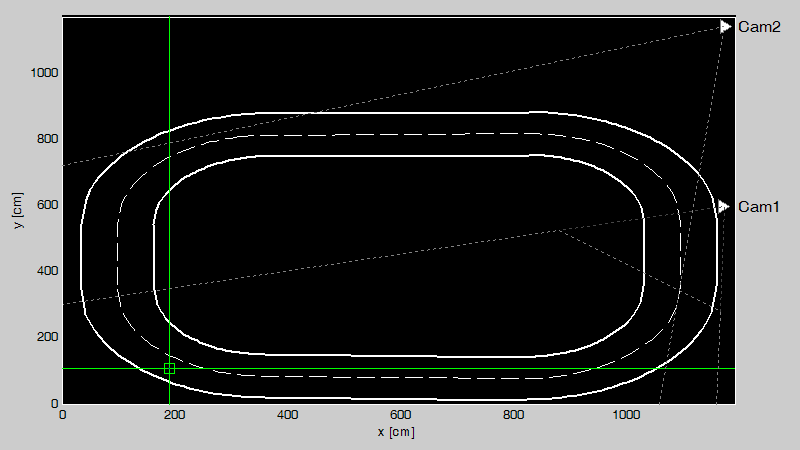
Neben Anzahl und Ausrichtung der Kameras können das Koordinatensystem der Ebene als auch die Abmaße des Fahrzeugs frei gewählt werden.
Die Genauigkeit ist vorrangig von der Entfernung des Fahrzeugs zur Kamera und von der Auflösung des Bildes abhängig.
Diese Messung kann im Innen- und Außenbereich angewendet werden, jedoch muss ausreichend Helligkeit vorhanden sein.
